Overview
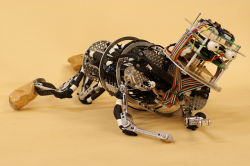
Pneuborn is a robotic infant simulator that focuses on the development of musculoskeletal systems. It can teach itself to crawl, sit, and stand using pattern generators and learning algorithms. The robot is powered by pneumatic artificial muscles and is designed based on the structure of a real human infant, equipped with a robust pneumatic musculoskeletal system.
Key facts
- Payload
- —
- Reach
- —
- Speed
- —
- Weight
- 6.4 kg
- IP rating
- —
- Battery
- —
- Power
- —
- Autonomy
- semi-autonomous
- Launch year
- 2009
- Price
- —
- Status
- active
Detailed specifications
Motion & kinematics2
- Dof Total
- 26
- Dof Per Arm
- 11
Sensors1
- Sensor Suite
- external motion capture system
Compute1
- Onboard Compute
- Renesas H8-3069 microcontroller
Other17
- Height Mm
- 800
- Applications
- research
- Sub Category
- bipedal
- Datasheet Url
- http://er.ams.eng.osaka-u.ac.jp/asadalab/?lang=en
- Mobility Type
- bipedal
- Model Variants
- Pneuborn-7II, Pneuborn-13
- Company Country
- Japan
- Humanoid Subtype
- research_platform
- Country Of Origin
- JPN
- Industries Served
- research_academic
- Is Research Grade
- true
- Target Industries
- research_academic
- Availability Status
- research-only
- Deployment Maturity
- prototype
- Primary Applications
- research_development
- Additional Information
- - Designed to resemble a 7-month-old infant for biomechanical research - Focus on musculoskeletal system and motor development studies - Part of the Pneuborn series at Osaka University's Hosoda Laboratory - Primarily used in academic research settings
- Deployment Environment
- indoor
Reviews for Pneuborn
Loading reviews…