Overview
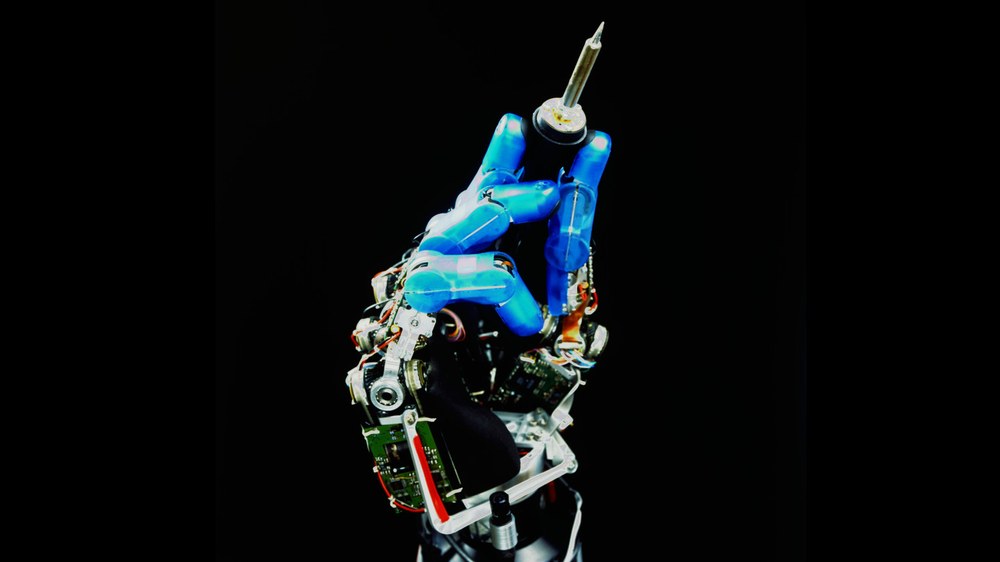
The DLR Hand II is an anthropomorphic dexterous grasping and manipulation system. It consists of four identical fingers with four joints and three degrees of freedom each, along with an additional degree of freedom in the palm for stable grasping or fine manipulation. It integrates an actuation system, sensors, and communication electronics, providing flexibility for different robots. Its design mimics a human hand, allowing it to grasp and manipulate a variety of objects in unknown environments, making it suitable for use in humanoid robots like Rollin' Justin.
Key facts
- Payload
- 3 kg
- Reach
- —
- Speed
- —
- Weight
- 1.8 kg
- IP rating
- —
- Battery
- —
- Power
- —
- Autonomy
- —
- Launch year
- 1998
- Price
- —
- Status
- active
Detailed specifications
Motion & kinematics3
- Hand Dof
- 13
- Dof Total
- 13
- Dof Per Hand
- 15
Power & battery1
- Power Supply
- 24V DC (20A)
Sensors1
- Sensor Suite
- torque_sensor, joint_position_sensor, motor_position_sensor, temperature_sensor
Compute1
- Onboard Compute
- multiprocessor system with DSP
Safety & certifications1
- Grip Force N
- 30
Other9
- Size Cm
- 30 × 15 × 15
- Height Mm
- 300
- Speed Rad S
- 360°/s joint velocity
- Applications
- teleoperation
- Company Country
- DE
- Deployment Notes
- Used in the Space Justin setup for telemanipulation and grasping objects during space operations.
- Industries Served
- aerospace
- Additional Information
- - Modular concept - Quick release adapter - All four fingers are identical and interchangeable - Designed for use in two-handed manipulation scenarios - Research in dynamic grasp acquisition - Focus on reducing complexity for household robotics
- Deployment Environment
- indoor
Reviews for Hand II
Loading reviews…