Overview
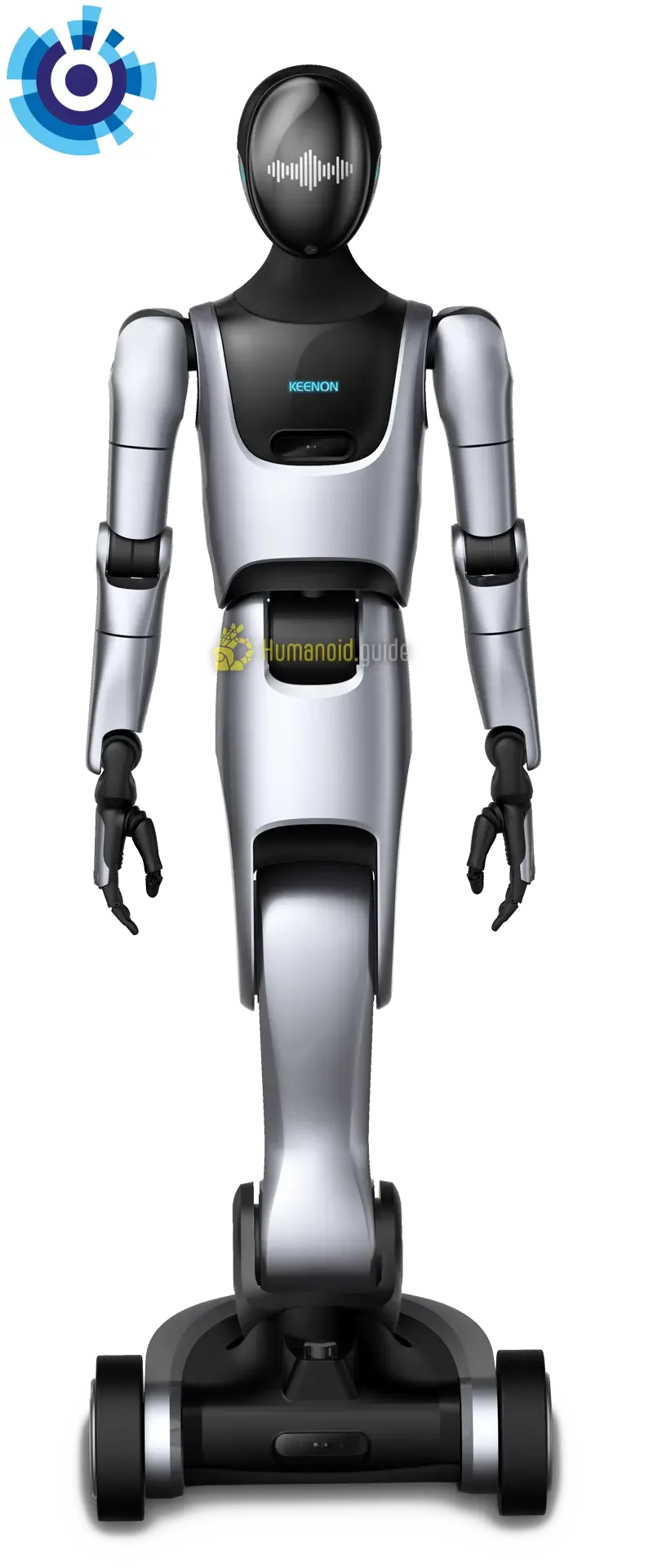
A humanoid robot designed for engaging interactions and service in various environments.
Flagship features
- Designed for multi-robot coordination
- Bipedal locomotion with obstacle avoidance, stand-up-from-fall, and stair walking capabilities
- Seamless integration with Keenon’s robot matrix including other robots like DINERBOT and KLEENBOT
- Aiming to address labor shortages in hospitality by offering scalable and adaptive AI solutions
Specifications
Category: Humanoid- Form factor
- service humanoid
- Height
- 172 cm
- Weight
- 110 kg
- Mobility
- bipedal
- Walking speed
- ≤ 0.8056 m/s
- Total DOF
- 36
- DOF / hand
- 6
- Payload
- 3 kg
- Lifting capacity
- 3 kg
- Battery
- 3 h
- Hot-swap battery
- No
- Onboard compute
- Linux
- LiDAR
- No
- F/T sensors
- No
- VLM on-board
- No
- Imitation learning
- No
- Bimanual
- No
- Stair climbing
- No
- Programming
- multimodal fusion perception
- ROS 1
- No
- ROS 2
- No
- API / SDK
- No
- Maturity
- production scale
- Environments
- hospitality, logistics
- Industries
- service
- Price tier
- 500k plus
- Pricing model
- purchase
Detailed specifications
Other14
- Height Mm
- 1720
- Applications
- hospitality,logistics,property operations
- Sub Category
- bipedal
- Datasheet Url
- View Link
- Price Currency
- USD
- Company Country
- CN
- Deployment Notes
- Focused primarily in China, with plans for expansion.
- Price On Request
- false
- Running Speed Ms
- 2.9
- Youtube Video Id
- t6K-tCAg1Z0
- Country Of Origin
- CHN
- Is Research Grade
- false
- Availability Status
- in production
- Additional Information
- - Designed for multi-robot coordination - Bipedal locomotion with obstacle avoidance, stand-up-from-fall, and stair walking capabilities. - Seamless integration with Keenon’s robot matrix including other robots like DINERBOT and KLEENBOT. - Aiming to address labor shortages in hospitality by offering scalable and adaptive AI solutions.
Compare with peers
Reviews for XMAN-R1
Loading reviews…