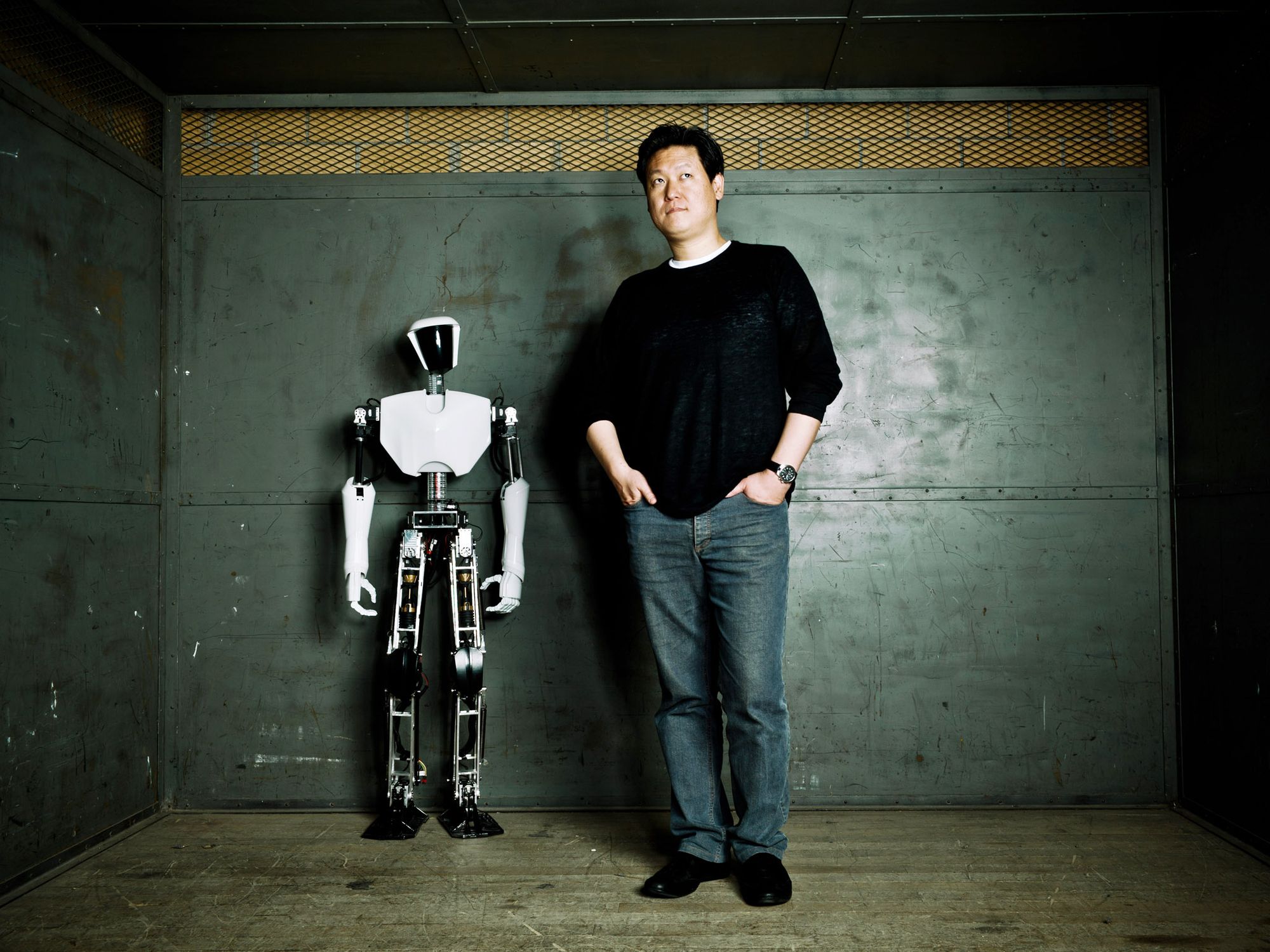
The CHARLI is a Humanoid robot developed by UCLA and RoMeLa (United States), launched 2011. Key specifications: form factor full bipedal, height 141 cm, weight 12.1 kg, mobility bipedal.
Robo Index
Strong evidence
3 of 10 signals present
Recomputed nightly from public data. Missing data is skipped, never zero-filled — and rankings are never for sale.
Weighted factors
average of the 3 scored · blanks don't count


Will it fit your job?
Tell us the job in plain words — we'll show how this robot measures up, line by line.
Tell us what your job needs — payload, budget, region, must-have certifications — and we'll show how CHARLI measures up, requirement by requirement. The Robo Index (trust) above is shown for every buyer, regardless.
Overview
CHARLI is an adult-size humanoid robot designed as a platform to study robot mobility and autonomy. It can walk, kick a ball, and change its posture to avoid falls if something or someone pushes on it. The robot features a modular, lightweight design capable of reacting to external disturbances using an active stabilization strategy.
Flagship features
- CHARLI is capable of walking in all directions as well as turning, kicking, and performing gestures and simple upper body manipulation tasks
Buyer decision signals
Viability
UCLA founded
Specifications
Category: Humanoid- Form factor
- full bipedal
- Height
- 141 cm
- Weight
- 12.1 kg
- Mobility
- bipedal
- Walking speed
- 2.1 m/s
- Total DOF
- 20
- DOF / arm
- 4
- DOF / hand
- 1
- Battery
- 0.5 h
- Hot-swap battery
- No
- Onboard compute
- Single-board computer with 1.6 GHz Intel Atom CPU
- Sensors
- camera, three-axis rate gyro, three-axis accelerometer
- LiDAR
- No
- F/T sensors
- Yes
- VLM on-board
- No
- Imitation learning
- No
- Bimanual
- No
- Stair climbing
- No
- Terrain
- rough_indoor, outdoor_unstructured
- Programming
- Ubuntu Linux OS and custom operation and control program coded in C++
- ROS 1
- No
- ROS 2
- No
- API / SDK
- No
- SDK languages
- C++
- Maturity
- prototype
- Environments
- outdoor
- Industries
- education
Detailed specifications
Other4
- Sub Category
- bipedal
- Company Country
- US
- Software Platform
- Ubuntu Linux OS with custom control program coded in C++; LabVIEW version also implemented
- Additional Information
- - CHARLI is capable of walking in all directions as well as turning, kicking, and performing gestures and simple upper body manipulation tasks. - CHARLI-2 is honored “2011 Best Invention of the Year” by Time magazine, won the Louis Vuitton Best Humanoid Award (a.k.a. Louis Vuitton Cup) at RoboCup 2011, and won 1st place in AdultSize league for autonomous soccer at RoboCup 2011 (as well as many other awards).
Where to buy
Get a price or reach an authorized seller — pick your region, then request a quote.
No authorized seller is listed for this robot yet — request a quote below and we’ll connect you with UCLA and RoMeLa or an authorized seller.
Request a quote — goes straight to UCLA and RoMeLa.
Every authorized seller serving your region is shown equally — placement is never sold, and this data never affects a robot’s score. A seller’s absence here doesn’t mean they aren’t authorized.
Company milestones
- —MilestoneUCLA founded
- —MilestoneWestwood campus opens
- —MilestoneCHARLI can walk, kick a ball, and change posture to avoid falls
- —LaunchCHARLI: Cognitive Humanoid Autonomous Robot with Learning Intelligence
More videos
Team CHARLI RoboCup 2011 Champions
Frequently asked questions
- Who makes the CHARLI?
- The CHARLI is developed by UCLA and RoMeLa, based in United States.
- What type of robot is the CHARLI?
- The CHARLI is a Humanoid robot made by UCLA and RoMeLa.
- How much does the CHARLI cost?
- Pricing for the CHARLI is not publicly listed — contact UCLA and RoMeLa for a quote.
- When was the CHARLI launched?
- The CHARLI was launched in 2011.
- What are the key specifications of the CHARLI?
- Key specifications of the CHARLI: form factor full bipedal, height 141 cm, weight 12.1 kg, mobility bipedal, walking speed 2.1 m/s.
Reviews for CHARLI
Loading reviews…