Overview
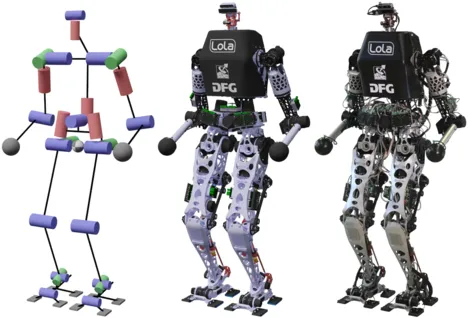
The Humanoid Robot LOLA is an electrically actuated biped robot with 26 distributed joints, designed for advanced research in dynamics, motion planning, and control systems. Weighing 68 kg and standing at 176 cm tall, it features sophisticated sensory systems and a robust control framework that enables real-time autonomous operation in complex environments.
Key facts
- Weight
- 68 kg
Detailed specifications
Motion & kinematics2
- Dof Total
- 26
- Dof Per Arm
- 3
Sensors1
- Sensor Suite
- six-axis force-torque sensors, accelerometer, ring laser gyroscope, vision sensors
Compute1
- Onboard Compute
- Onboard PC with decentralized control modules
Other9
- Height Mm
- 1760
- Applications
- research
- Datasheet Url
- https://mediatum.ub.tum.de/doc/1482152/0443835794831.pdf
- Company Country
- DE
- Navigation Type
- vision
- Deployment Notes
- Notable for its research focus on autonomous, vision-guided walking; presented at an international conference.
- Walking Speed Ms
- 1.39
- Additional Information
- - Advanced motion planning and control algorithms - Real-time autonomous operation - Focus on dynamic locomotion and stability - Participates in various cooperative projects - Supported by significant research foundations
- Deployment Environment
- both
Reviews for Humanoid Robot LOLA
Loading reviews…