Are you a robotics manufacturer?
Claim your page to correct your specs and keep your listing current.
University of California at Berkeley is a robotics company founded 1868, based in United States, developing 2 robots primarily in the Research category.
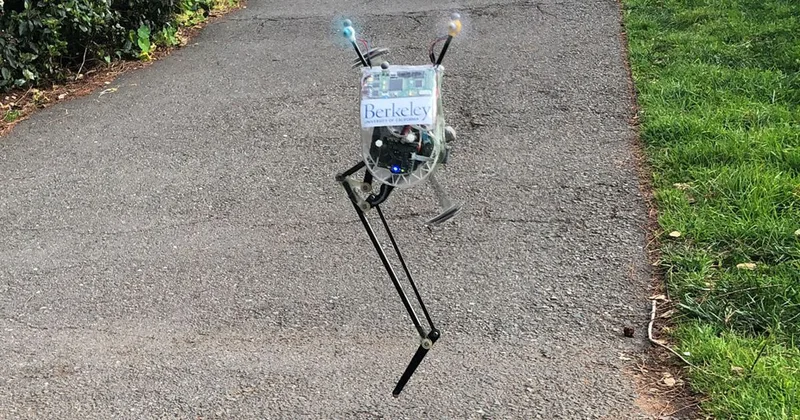
Salto-1P is a small monopedal jumping robot developed at UC Berkeley’s Biomimetic Millisystems Lab, not a product of an independent robotics company. It was created for extreme jumping locomotion research and can hop vertically and horizontally using aerodynamic thrusters and other control systems.
Company facts
- HQ
- Berkeley, United States
- Founded
- 1868 · 158 yrs
Robo Score
Products, Range, Traction set the number — the three factors present for every company. Momentum, Attention, Readiness describe the brand but never move it. A value we don't have reads —, never zero. Claiming or paying moves nothing.
4 of 6 factors known. How it's calculated
Awards & recognition
- Most vertically agile robot ever createdeecs.berkeley.edu ↗
- Most Amazing Jumping Robot (IEEE Spectrum)eecs.berkeley.edu ↗
Milestones
UC Berkeley researchers presented Salto-1P, an extreme jumping robot for studying jumping locomotion.
Press coverage
- Meet Salto-1P, the jumping robot
TechCrunch · Jul 2018
- Salto-1P robot: Researchers show off its bouncing talents
TechXplore · Jul 2017
Research & Prototype buying guides
Industry Knowledge →
The research-robot procurement RFP: questions and red flags
A structured RFP for research robot procurement covers SDK openness, ROS 2 support, spare parts, export control, and end-of-life risk. This is the checklist tha…

A 90-day playbook to stand up a new platform in a lab
Most research robot deployments fail at the handoff: the student who set it up leaves, and no one can reproduce the environment. This 90-day playbook builds rep…

Matching research robot platform to research goal
The wrong platform for a research domain creates years of friction. This domain-by-domain breakdown maps hardware categories to research goals and evaluates ROS…