Robo Index
Speculative — thin evidence
4 of 10 signals present
Recomputed nightly from public data. Missing data is skipped, never zero-filled — and rankings are never for sale.
Weighted factors
average of the 4 scored · blanks don't count
Does it fit your job?
Overview
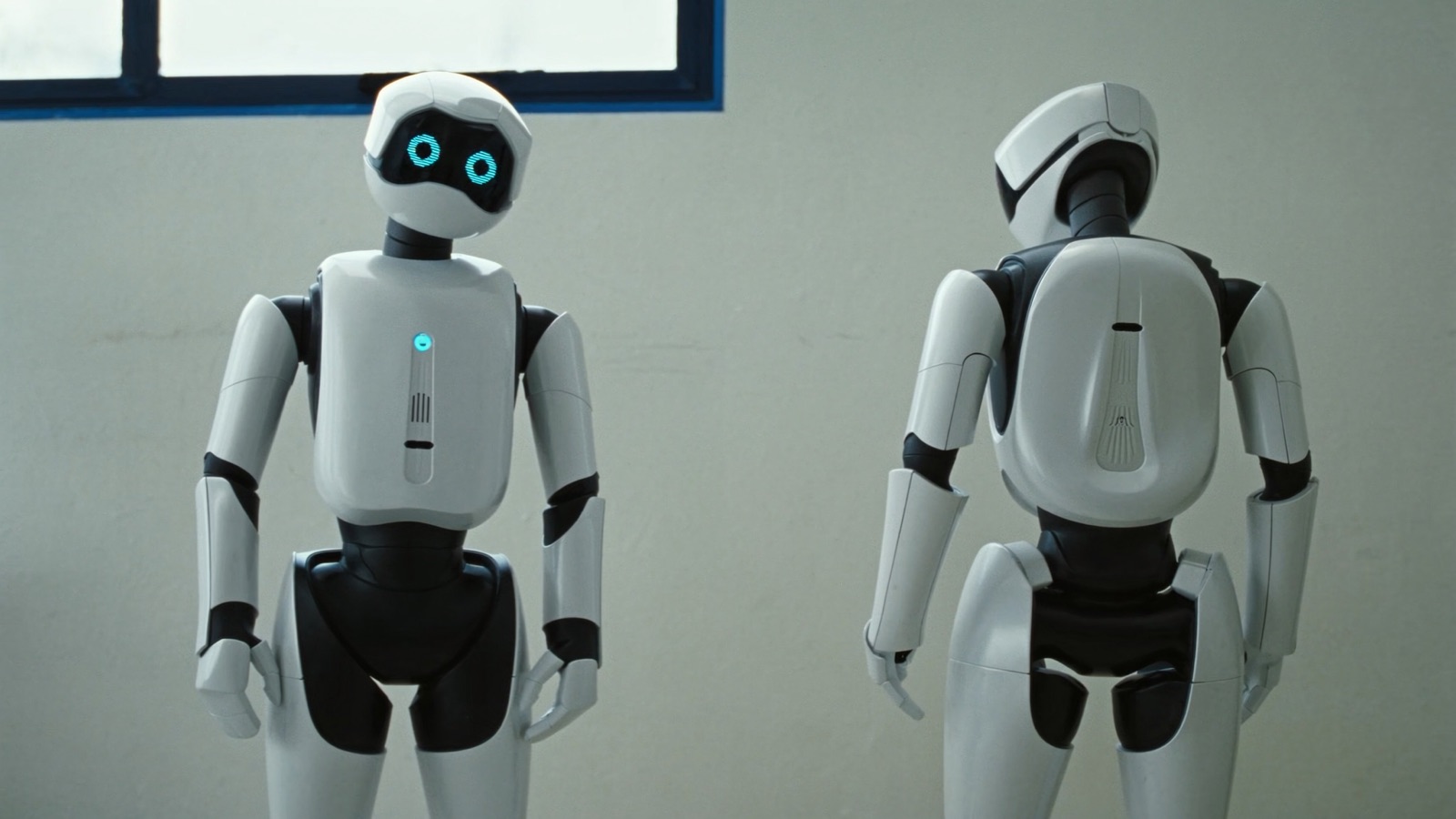
HRP-2 is the final robotic platform for the Humanoid Robotics Project. The total robotic system was designed and integrated by Kawada Industries, Inc. together with the Humanoid Research Group of National Institute of Advanced Industrial Science and Technology (AIST). It features a highly articulated body with 30 degrees of freedom, enabling complex movements and interactive operations.
Flagship features
- Many DOF system despite lightweight construction: 154 cm height, 58 kg mass, and 30 DOF
- Cantilevered crotch joint structure allows for walking in confined areas
- Highly compact electrical system packaging to forgo a "backpack"
- Cooling systems in leg actuators enhance continuous stepping endurance
- Enhanced links and axial stiffness improve walking motion and operational performance
- Open architecture allows users to develop application software
Buyer decision signals
Deployments
Research institutes
Viability
HRP-4 development announced
Specifications
Category: Humanoid- Form factor
- full bipedal
- Height
- 154 cm
- Weight
- 58 kg
- Mobility
- bipedal
- Walking speed
- ≤ 0.55 m/s
- Total DOF
- 30
- Payload
- 2 kg
- Sensors
- vibration_gyro, velocity_sensor, force_sensor
- LiDAR
- No
- F/T sensors
- Yes
- Terrain
- uneven surfaces
- Programming
- open API
- API / SDK
- Yes
- Maturity
- research
- Environments
- laboratory
- Industries
- research, robotics
Company profile
- Founded
- 1962
Detailed specifications
Power & battery1
- Power System
- NiMH Battery DC 48V 14.8Ah
Other5
- Total Width
- 620mm
- Walking Speed
- 0~2km/h
- Datasheet Url
- View Link
- Additional Information
- - Many DOF system despite lightweight construction: 154 cm height, 58 kg mass, and 30 DOF. - Cantilevered crotch joint structure allows for walking in confined areas. - Highly compact electrical system packaging to forgo a "backpack". - Cooling systems in leg actuators enhance continuous stepping endurance. - Enhanced links and axial stiffness improve walking motion and operational performance. - Open architecture allows users to develop application software. - Experiments planned for uneven surface walking and tipping-over control.
- Mass (Including Batteries)
- 58kg
Who runs it· deployment evidence
1 on record · none maker-verified yet. Each links to its source — open it and judge.
- Research institutessource ↗
Company milestones
- Nov 2010LaunchHRP-4 development announced
- Jun 2007MilestoneHRP-3 Promet Mk-II announced
- Sep 2002LaunchHRP-2 prototype developed
- 2013MilestoneKawada Robotics Corp. established
- 2011DeploymentHRP-4 order and supply start
- 2002LaunchHRP-2 Promet announced
- —MilestoneDate of establishment
- —LaunchHumanoid robot development begins
Compare with peers
More by Kawada Industries
Reviews for HRP-2 Promet
Loading reviews…