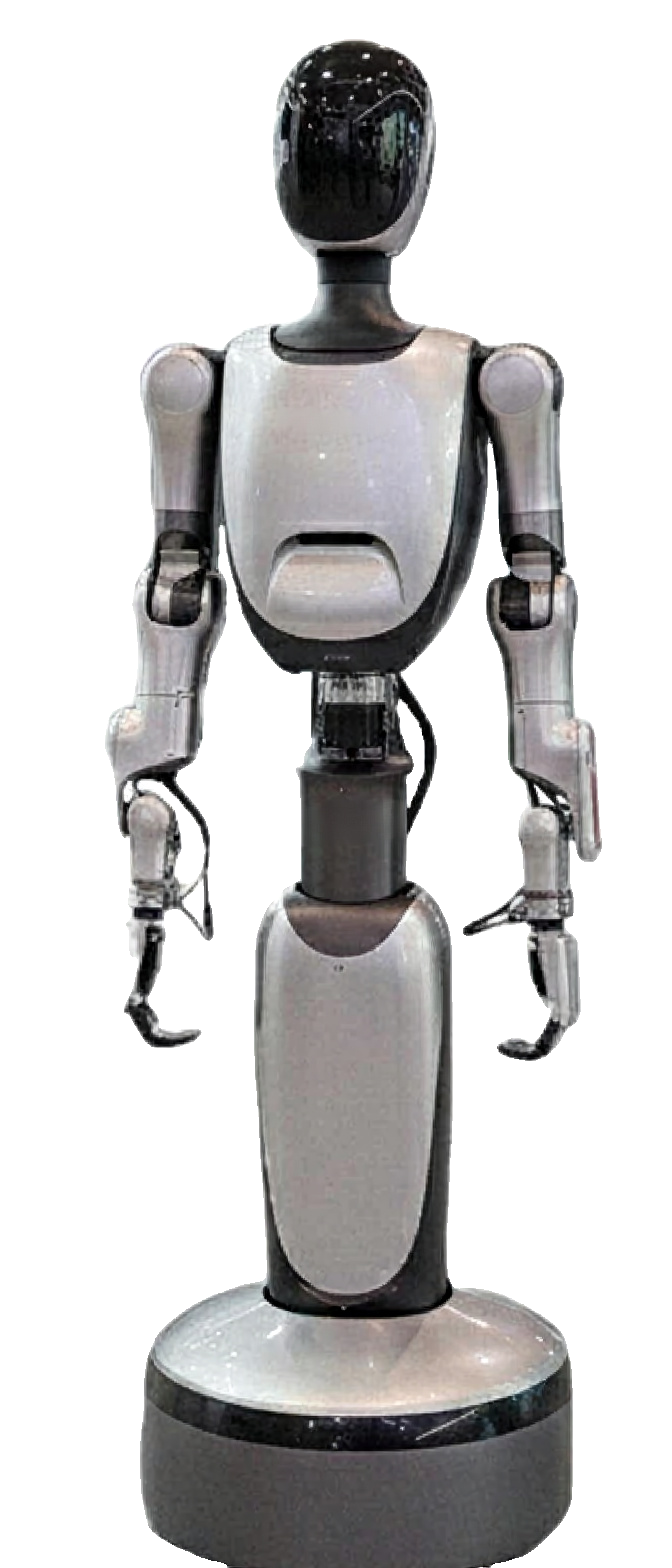
The Reachy 2 is a Humanoid robot developed by Pollen Robotics (France), launched 2024, listed at $70,000–$78,000 USD (unverified). Key specifications: form factor full bipedal, height 166 cm, weight 50 kg, mobility bipedal.
Robo Index
Adequate evidence
7 of 10 signals present
Recomputed nightly from public data. Missing data is skipped, never zero-filled — and rankings are never for sale.
Weighted factors
average of the 7 scored · blanks don't count
Will it fit your job?
Tell us the job in plain words — we'll show how this robot measures up, line by line.
Tell us what your job needs — payload, budget, region, must-have certifications — and we'll show how Reachy 2 measures up, requirement by requirement. The Robo Index (trust) above is shown for every buyer, regardless.
Overview
Reachy 2 is the first open-source humanoid robot specifically designed for the development of embodied AI and real-world applications. Reachy 2 is the ideal bimanual mobile manipulator for AI & robotics labs. It can be teleoperated or controlled with Python, and runs on ROS2 Humble. With 7 DOFs, Reachy 2’s arms feature similar dimensions, proportions and movements as in an adult human arm with a payload of 3 kg.
Flagship features
- Designed for teleoperation and AI applications
- Modular design allows for customization and adaptability
- Extensive documentation available, including safety guidelines and setup instructions
Buyer decision signals
Deployments
Pollen Robotics
Viability
3,000 Reachy Mini units shipped
Specifications
Category: Humanoid- Form factor
- full bipedal
- Height
- 166 cm
- Weight
- 50 kg
- Mobility
- bipedal
- Walking speed
- 0.83 m/s
- Total DOF
- 14
- DOF / arm
- 7
- Payload
- 3 kg
- Lifting capacity
- 3 kg
- Hot-swap battery
- No
- Onboard compute
- Solidrun Bedrock v3000
- Sensors
- lidar
- LiDAR
- Yes
- F/T sensors
- No
- VLM on-board
- No
- Imitation learning
- No
- Bimanual
- No
- Stair climbing
- No
- Terrain
- flat indoor
- Programming
- code python,teleoperation
- ROS 1
- Yes
- ROS 2
- Yes
- API / SDK
- Yes
- SDK languages
- Python
- Maturity
- commercial
- Environments
- indoor
- Industries
- robotics, AI
- Price tier
- 40-80K
- Pricing model
- purchase
Company profile
- Funding raised
- $2.8M
- Founded
- 2016
Detailed specifications
Other8
- Applications
- research,teleoperation
- Sub Category
- bipedal
- Datasheet Url
- View Link
- Model Variants
- Reachy 2 Dual Arm + Mobile Base,Reachy 2 Single Arm + Mobile Base,Reachy 2 Dual Arm,Reachy 2 Single Arm
- Company Country
- FR
- Navigation Type
- hybrid
- Deployment Notes
- Notable collaborations with META and Hugging Face.
- Additional Information
- - Designed for teleoperation and AI applications. - Modular design allows for customization and adaptability. - Extensive documentation available, including safety guidelines and setup instructions.
Who runs it· deployment evidence
1 on record · none maker-verified yet. Each links to its source — open it and judge.
- Pollen Robotics· France100 unitssource ↗
Where to buy
Get a price or reach an authorized seller — pick your region, then request a quote.
No authorized seller is listed for this robot yet — request a quote below and we’ll connect you with Pollen Robotics or an authorized seller.
Request a quote — goes straight to Pollen Robotics.
Every authorized seller serving your region is shown equally — placement is never sold, and this data never affects a robot’s score. A seller’s absence here doesn’t mean they aren’t authorized.
Company milestones
- Jan 2026Deployment3,000 Reachy Mini units shipped
- Apr 2025AcquisitionAcquired by Hugging Face
- Jan 2024MilestoneXPRIZE team page
- 2026MilestoneNVIDIA CES keynote demo with Reachy Mini
- 2026LaunchReachy Mini introduced as an open-source desktop robot
- 2025LaunchPollen Robotics to present Reachy 2 at CES 2025
- 2025LaunchReachy 2 introduced at CES 2025
- 2024LaunchReachy 2 launched
Compare with peers
More by Pollen Robotics
Frequently asked questions
- Who makes the Reachy 2?
- The Reachy 2 is developed by Pollen Robotics, based in France.
- What type of robot is the Reachy 2?
- The Reachy 2 is a Humanoid robot made by Pollen Robotics.
- How much does the Reachy 2 cost?
- The Reachy 2 is listed at $70,000–$78,000 USD in the Robolist catalogue, but this figure is unverified and not confirmed by Pollen Robotics — contact them for a quote.
- When was the Reachy 2 launched?
- The Reachy 2 was launched in 2024.
- What are the key specifications of the Reachy 2?
- Key specifications of the Reachy 2: form factor full bipedal, height 166 cm, weight 50 kg, mobility bipedal, walking speed 0.83 m/s.
Reviews for Reachy 2
Loading reviews…