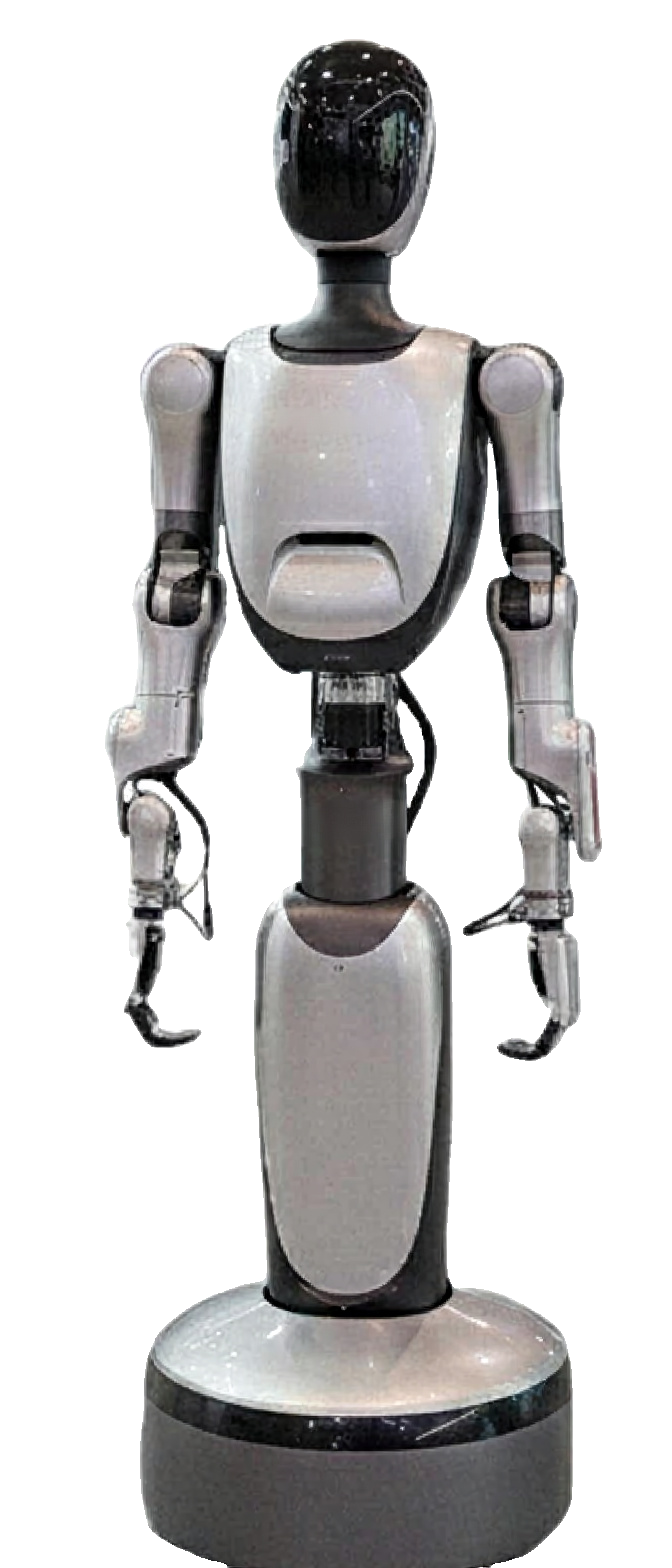
The RH5 Manus is a Humanoid robot developed by German Research Center for Artificial Intelligence, launched 2022. Key specifications: form factor full bipedal, height 187 cm, weight 36 kg, mobility bipedal.
Robo Index
Weak evidence
4 of 10 signals present
Recomputed nightly from public data. Missing data is skipped, never zero-filled — and rankings are never for sale.
Weighted factors
average of the 4 scored · blanks don't count
Will it fit your job?
Tell us the job in plain words — we'll show how this robot measures up, line by line.
Tell us what your job needs — payload, budget, region, must-have certifications — and we'll show how RH5 Manus measures up, requirement by requirement. The Robo Index (trust) above is shown for every buyer, regardless.
Overview
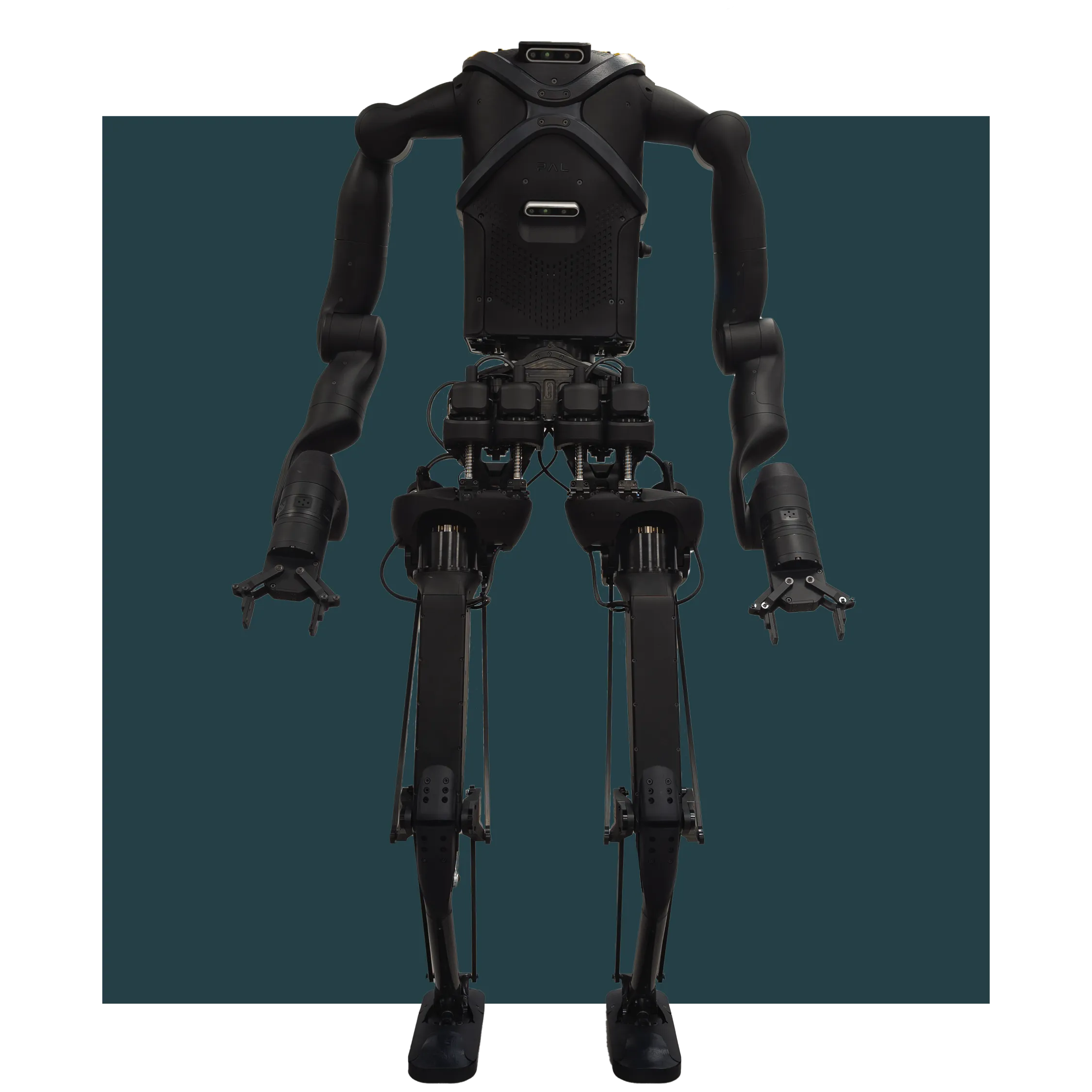
The humanoid robot 'RH5 Manus' was developed as part of the 'TransFIT' project as an assistance robot that can be used in the direct human environment for various applications, demonstrating dynamic movements and human-robot collaboration.
Flagship features
- Developed by DFKI's Robotics Innovation Center
- Purpose-built for autonomous assembly in space environments (e.g., moon station)
- Equipped with 2 x 4-finger grippers for manipulation
- Uses Velodyne VLP-16 LiDAR for mapping and self-localization
Buyer decision signals
Viability
ICHIBAN mission completed
Price
Published figures are build cost or program budget, not a purchase price
Specifications
Category: Humanoid- Form factor
- full bipedal
- Height
- 187 cm
- Weight
- 36 kg
- Mobility
- bipedal
- Walking speed
- 0.5 m/s
- Total DOF
- 19
- DOF / arm
- 8
- DOF / hand
- 4
- Payload
- 4 kg
- Lifting capacity
- 4 kg
- Onboard compute
- DFKI electronic stack with FPGA for motor control
- Sensors
- stereo_camera, imu, force_torque
- LiDAR
- Yes
- F/T sensors
- Yes
- VLM on-board
- Yes
- Imitation learning
- Yes
- Bimanual
- Yes
- Stair climbing
- Yes
- Terrain
- flat_indoor
- Programming
- teleoperation
- ROS 1
- Yes
- API / SDK
- Yes
- SDK languages
- Python, C++, ROS2
- Maturity
- prototype
- Environments
- indoor
- Industries
- space
Company profile
- Founded
- 1988
Detailed specifications
Other10
- Height
- 2000 mm
- Weight
- 62.5 kg
- Height Mm
- 1870
- Applications
- assistance,space robotics
- Sub Category
- upper-body-only
- Datasheet Url
- Preview PDF online
- Company Country
- DE
- Deployment Notes
- Not mentioned.
- Youtube Video Id
- YFnPJYkHxCg
- Additional Information
- - Developed by DFKI's Robotics Innovation Center. - Purpose-built for autonomous assembly in space environments (e.g., moon station). - Equipped with 2 x 4-finger grippers for manipulation. - Uses Velodyne VLP-16 LiDAR for mapping and self-localization.
Company milestones
- Jul 2025DeploymentICHIBAN mission completed
- 2020DeploymentMANTIS tested with consortium partners at DFKI Bremen
- 1988MilestoneFounded as PPP
- —MilestoneMANTIS described as DFKI mobile-manipulation research platform
- —MilestoneRH5 Manus further development of RH5
- —MilestoneRH5 Manus development at DFKI Robotics Innovation Center
Compare with peers
More by German Research Center for Artificial Intelligence
More videos
Design, Analysis and Control of the Series-Parallel Hybrid RH5 Humanoid Robot
Frequently asked questions
- Who makes the RH5 Manus?
- The RH5 Manus is developed by German Research Center for Artificial Intelligence.
- What type of robot is the RH5 Manus?
- The RH5 Manus is a Humanoid robot made by German Research Center for Artificial Intelligence.
- How much does the RH5 Manus cost?
- Pricing for the RH5 Manus is not publicly listed — contact German Research Center for Artificial Intelligence for a quote.
- When was the RH5 Manus launched?
- The RH5 Manus was launched in 2022.
- What are the key specifications of the RH5 Manus?
- Key specifications of the RH5 Manus: form factor full bipedal, height 187 cm, weight 36 kg, mobility bipedal, walking speed 0.5 m/s.
Reviews for RH5 Manus
Loading reviews…